Germany
Germany Italy
Italy USA
USA South Korea
South Korea UK
UK India
India France
France China
China Japan
JapanRoboter
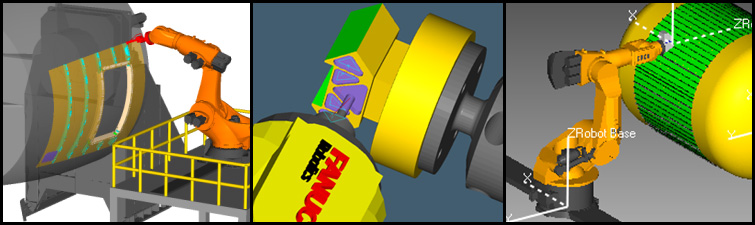
Mit VERICUT können 6-Achsen-Knickarm-Roboter führender Hersteller wie Fanuc, Kuka, ABB, Kawasaki, Motorman und andere simuliert werden. Auch zusätzliche Linear- und Rundachsen werden von VERICUT unterstützt. Mit solchen zusätzlichen Achsen kann die Reichweite und somit die Effektivität eines Roboters oftmals deutlich erhöht werden.
Zusätzlich zur Simulation, können Sie mit VERICUT den Bewegungsablauf des Roboters vor dem Postprozessorlauf optimal anpassen. NC-Programme die auf Werkzeugspitzen-Koordinaten basierend programmiert sind können auf die Roboterkinematik angepasst werden und in der entsprechenden Roboter Sprache ausgegeben werden. Oftmals werden Roboter mittels „teachen“ programmiert.
Die OFF-Line-Programmierung wird angewandt wenn präzise Positionen angefahren werden und der Prozess nachvollziehbar sein muss.
Typische Aufgaben in der Offline-Programmierung:
- Schneiden oder Trimmen
- Bohren und Nieten
- Fiber-placement